TOF是Time of flight的簡(jiǎn)寫,直譯為飛行時(shí)間的意思。飛行時(shí)間技術(shù)在廣義上可理解為通過(guò)測(cè)量物體、粒子或波在固定介質(zhì)中飛越一定距離所耗費(fèi)時(shí)間(介質(zhì)/距離/時(shí)間均為已知或可測(cè)量),從而進(jìn)一步理解離子或媒介某些性質(zhì)的技術(shù)。
1 測(cè)距 最早應(yīng)用該原理的器件是超聲測(cè)距儀。
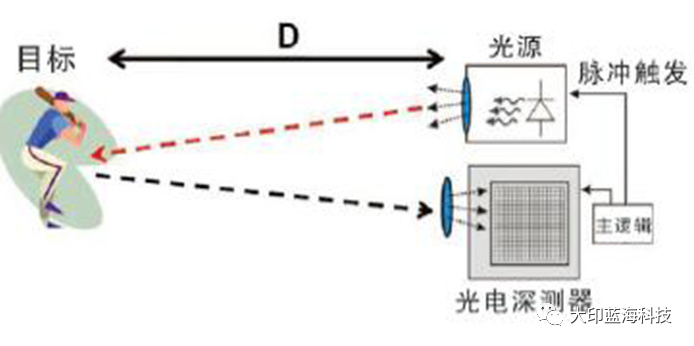
ToF測(cè)距方法屬于雙向測(cè)距技術(shù),它主要利用信號(hào)在兩個(gè)異步收發(fā)機(jī)(Transceiver)(或被反射面)之間往返的飛行時(shí)間來(lái)測(cè)量節(jié)點(diǎn)間的距離。傳統(tǒng)的測(cè)距技術(shù)分為雙向測(cè)距技術(shù)和單向測(cè)距技術(shù)。在信號(hào)電平比較好調(diào)制或在非視距視線環(huán)境下,基于RSSI(Received Signal Strength Indication,接收的信號(hào)強(qiáng)度指示)測(cè)距方法估算的結(jié)果比較理想;在視距視線環(huán)境下,基于ToF距離估算方法能夠彌補(bǔ)基于RSSI距離估算方法的不足。
ToF測(cè)距方法有兩個(gè)關(guān)鍵的約束:一是發(fā)送設(shè)備和接收設(shè)備必須始終同步;二是接收設(shè)備提供信號(hào)的傳輸時(shí)間的長(zhǎng)短。為了實(shí)現(xiàn)時(shí)鐘同步,ToF測(cè)距方法采用了時(shí)鐘偏移量來(lái)解決時(shí)鐘同步問(wèn)題。Renesas(Intersil)的ToF信號(hào)處理IC——ISL29501方案就是典型的ToF方案,可用于所有光照條件,并且實(shí)現(xiàn)了小型化和電池應(yīng)用的低功耗。因?yàn)樾盘?hào)處理器技術(shù)使用了基于相位的ToF來(lái)應(yīng)對(duì)檢測(cè)物體周圍的環(huán)境光的影響。
ISL29501 是一款創(chuàng)新的飛行時(shí)間 ( Time of Flight,簡(jiǎn)稱 ToF ) 信號(hào)處理 IC,可與外部發(fā)射器(LED或激光)及光敏二極管一起構(gòu)成完整的目標(biāo)物檢測(cè)和距離測(cè)量解決方案。ISL29501 提供[敏感詞]的功能,包括超小尺寸、低功耗和出色的性能,是構(gòu)成物聯(lián)網(wǎng) ( IoT ) 的聯(lián)網(wǎng)設(shè)備以及消費(fèi)移動(dòng)設(shè)備和新興商業(yè)無(wú)人機(jī)應(yīng)用的理想選擇。ISL29501 采用電源管理技術(shù)專長(zhǎng)來(lái)節(jié)省功耗,并通過(guò)多項(xiàng)創(chuàng)新成果延長(zhǎng)電池續(xù)航時(shí)間。可編程電流可達(dá) 255mA 的片上發(fā)射器 DAC 允許系統(tǒng)設(shè)計(jì)工程師選擇他們中意的用于驅(qū)動(dòng)外紅外 ( IR ) LED 或激光的電流電平。該特性可幫助優(yōu)化距離測(cè)量、目標(biāo)物檢測(cè)和功率預(yù)算。ISL29501 的單次觸發(fā)模式有助于設(shè)計(jì)工程師定義針對(duì)初始目標(biāo)物檢測(cè)和近似距離測(cè)量的采樣周期,從而節(jié)省功耗,而連續(xù)模式能夠更準(zhǔn)確地測(cè)量距離。ISL29501 還執(zhí)行系統(tǒng)校準(zhǔn),以適應(yīng)外部元件由于溫度和環(huán)境光條件變化而引起的性能波動(dòng)。
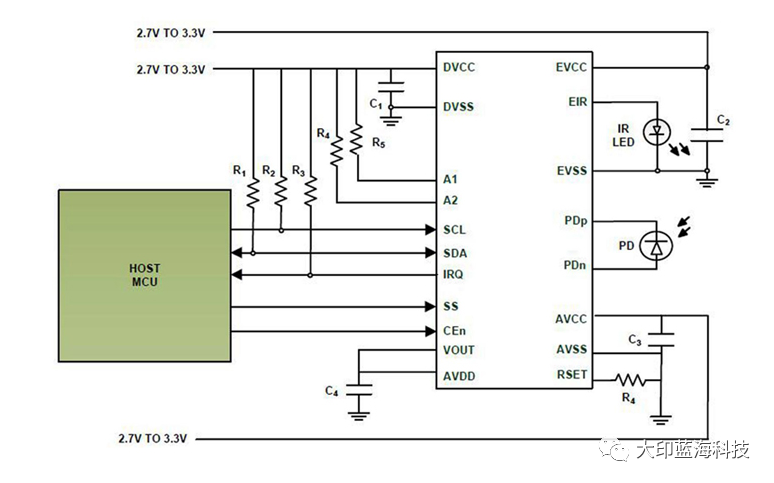
ISL29501典型應(yīng)用電路
2 微電子學(xué)
飛行時(shí)間技術(shù)可用來(lái)估計(jì)電子遷移相關(guān)性質(zhì)。起初該原理被用于測(cè)量低電導(dǎo)率的薄膜,后來(lái)進(jìn)一步拓展到了常見(jiàn)半導(dǎo)體等。利用激光或電壓脈沖激發(fā)出來(lái)的大量電荷,該技術(shù)也能用于金屬-絕緣體-金屬(MDM)結(jié)構(gòu) [2] 或有機(jī)場(chǎng)效應(yīng)晶體管 [3] 等領(lǐng)域。
3 醫(yī)學(xué)
在磁共振血管造影(Magnetic resonance angiography,MRA)領(lǐng)域,飛行時(shí)間法是一項(xiàng)主要的基礎(chǔ)技術(shù)。MRA可用于動(dòng)脈瘤,血管狹窄等癥狀的判斷,或用于某些解剖學(xué)領(lǐng)域。
4 質(zhì)譜學(xué)
在飛行時(shí)間質(zhì)譜學(xué)領(lǐng)域,不同的離子可通過(guò)電場(chǎng)加速至同樣的動(dòng)能,而其速度由質(zhì)荷比決定。因此可用過(guò)飛行時(shí)間技術(shù)測(cè)量速度從而得知質(zhì)荷比,并進(jìn)一步得知?jiǎng)幽艿刃畔ⅰ?/span>
連續(xù)波ToF和脈沖ToF
對(duì)于不具有高精度要求的應(yīng)用,CW系統(tǒng)可能比基于脈沖的系統(tǒng)更易于實(shí)現(xiàn),因?yàn)楣庠床灰欢ㄒ浅6蹋揖哂锌焖俚纳仙?下降沿,盡管很難再現(xiàn)。在實(shí)踐中是完美的正弦波。然而,如果對(duì)精度的要求變得更加嚴(yán)格,則將需要更高頻率的調(diào)制信號(hào),并且在實(shí)踐中可能難以實(shí)現(xiàn)。
由于照明信號(hào)的周期性,來(lái)自CW系統(tǒng)測(cè)量的任何相位測(cè)量都將每2π環(huán)繞一次,這意味著會(huì)有混疊距離。對(duì)于只有一個(gè)調(diào)制頻率的系統(tǒng),混疊距離也將是[敏感詞]可測(cè)量距離。為了克服該限制,可以使用多個(gè)調(diào)制頻率來(lái)執(zhí)行相位展開(kāi),其中,如果具有不同調(diào)制頻率的兩個(gè)(或多個(gè))相位測(cè)量值與估計(jì)距離相一致,則可以確定對(duì)象的真實(shí)距離。這種多調(diào)制頻率方案還可用于減少多徑誤差,該誤差在來(lái)自物體的反射光在返回傳感器之前撞擊另一個(gè)物體(或在透鏡內(nèi)部?jī)?nèi)部反射)時(shí)發(fā)生,從而導(dǎo)致測(cè)量誤差。
取決于其配置,CMOS ToF成像器往往具有更大的靈活性和更快的讀出速度,因此可以實(shí)現(xiàn)諸如感興趣區(qū)域(RoI)輸出之類的功能。
在溫度范圍內(nèi)校準(zhǔn)CW ToF系統(tǒng)可能比脈沖ToF系統(tǒng)容易。隨著系統(tǒng)溫度的升高,由于溫度變化,解調(diào)信號(hào)和照明將相對(duì)于彼此偏移,但是這種偏移只會(huì)影響測(cè)量距離,而偏移誤差在整個(gè)范圍內(nèi)都是恒定的,并且深度線性度基本保持穩(wěn)定。
連續(xù)波系統(tǒng)的缺點(diǎn):
盡管CMOS傳感器與其他傳感器相比具有更高的輸出數(shù)據(jù)速率,但CW傳感器需要在多個(gè)調(diào)制頻率上進(jìn)行四個(gè)相關(guān)函數(shù)采樣以及多幀處理才能計(jì)算深度。較長(zhǎng)的曝光時(shí)間可能會(huì)限制系統(tǒng)的總體幀速率,或者可能導(dǎo)致運(yùn)動(dòng)模糊,從而可能會(huì)將其限制用于某些類型的應(yīng)用程序。這種更高的處理復(fù)雜性可能需要外部應(yīng)用程序處理器,這可能超出了應(yīng)用程序的要求。
對(duì)于更長(zhǎng)距離的測(cè)量或環(huán)境光水平較高的環(huán)境,將需要更高的連續(xù)光功率(與脈沖ToF相比);激光的這種連續(xù)照射可能會(huì)導(dǎo)致散熱和可靠性問(wèn)題。
基于脈沖的ToF技術(shù)系統(tǒng)的優(yōu)勢(shì):
基于脈沖的ToF技術(shù)系統(tǒng)通常依賴在短積分窗口內(nèi)以非常短的脈沖串發(fā)射的高能量光脈沖。這具有以下優(yōu)點(diǎn):
它使設(shè)計(jì)對(duì)環(huán)境光穩(wěn)定的系統(tǒng)變得更加容易,因此更有利于室外應(yīng)用。
較短的曝光時(shí)間可[敏感詞]地減少運(yùn)動(dòng)模糊的影響。
在基于脈沖的ToF系統(tǒng)中,照明的占空比通常比可比的CW系統(tǒng)的照明占空比低得多,因此具有以下優(yōu)點(diǎn):
在較低范圍的應(yīng)用中,它降低了系統(tǒng)的整體功耗。過(guò)將脈沖猝發(fā)置于幀中與其他系統(tǒng)不同的位置,可以避免來(lái)自其他脈沖ToF系統(tǒng)的干擾。這可以通過(guò)在各種系統(tǒng)的幀中協(xié)調(diào)脈沖的放置或通過(guò)使用外部光電檢測(cè)器確定其他系統(tǒng)的脈沖的位置來(lái)完成。另一種方法是動(dòng)態(tài)隨機(jī)化脈沖突發(fā)的位置,這將消除協(xié)調(diào)各個(gè)系統(tǒng)之間的時(shí)序的需要,但不會(huì)完全消除干擾。由于脈沖時(shí)序和寬度不需要統(tǒng)一,因此可以實(shí)施不同的時(shí)序方案以實(shí)現(xiàn)諸如更寬的動(dòng)態(tài)范圍和自動(dòng)曝光等功能。
基于脈沖的ToF技術(shù)系統(tǒng)的缺點(diǎn):
由于透射光脈沖和快門的脈沖寬度需要相同,因此系統(tǒng)的定時(shí)控制需要非常精確,并且根據(jù)應(yīng)用需要可能需要皮秒級(jí)的精度。為了獲得[敏感詞]效率,照明脈沖寬度必須非常短,但功率卻很高。因此,激光驅(qū)動(dòng)器需要非常快的上升/下降沿(小于1 ns)。與CW系統(tǒng)相比,溫度校準(zhǔn)可能更加復(fù)雜,因?yàn)闇囟茸兓瘯?huì)影響單個(gè)脈沖寬度,不僅影響偏移和增益,還影響其線性。
關(guān)于dTOF和iTOF
了解了ToF的概念之后,讓我們?cè)賮?lái)深入了解一下兩類ToF的基本成像原理
dToF,全稱是direct Time-of-Flight。顧名思義,dToF直接測(cè)量飛行時(shí)間。dToF核心組件包含VCSEL、單光子雪崩二極管SPAD和時(shí)間數(shù)字轉(zhuǎn)換器TDC。Single Photon Avalanche Diode(SPAD)是一種具有單光子探測(cè)能力的光電探測(cè)雪崩二極管,只要有微弱的光信號(hào)就能產(chǎn)生電流。dToF模組的VCSEL向場(chǎng)景中發(fā)射脈沖波,SPAD接收從目標(biāo)物體反射回來(lái)的脈沖波。Time Digital Converter(TDC)能夠記錄每次接收到的光信號(hào)的飛行時(shí)間,也就是發(fā)射脈沖和接收脈沖之間的時(shí)間間隔。dToF會(huì)在單幀測(cè)量時(shí)間內(nèi)發(fā)射和接收N次光信號(hào),然后對(duì)記錄的N次飛行時(shí)間做直方圖統(tǒng)計(jì),其中出現(xiàn)頻率[敏感詞]的飛行時(shí)間t用來(lái)計(jì)算待測(cè)物體的深度, 。圖1是dToF單個(gè)像素點(diǎn)記錄的光飛行時(shí)間直方圖,其中,高度[敏感詞]的柱對(duì)應(yīng)的時(shí)間就是該像素點(diǎn)的最終光飛行時(shí)間。
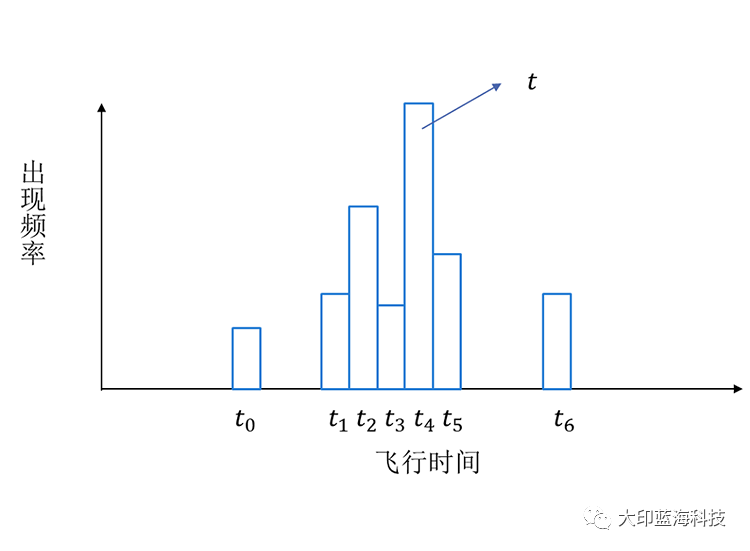
單像素記錄的光飛行時(shí)間直方圖示意圖
dToF的原理看起來(lái)雖然很簡(jiǎn)單,但是實(shí)際能達(dá)到較高的精度很困難。除了對(duì)時(shí)鐘同步有非常高的精度要求以外,還對(duì)脈沖信號(hào)的精度有很高的要求。普通的光電二極管難以滿足這樣的需求。而dToF中的核心組件SPAD由于制作工藝復(fù)雜,能勝任生產(chǎn)任務(wù)的廠家并不多,并且集成困難。所以目前研究dToF的廠家并不多,更多的是在研究和推動(dòng)iToF。
iToF的概念和dToF相對(duì)應(yīng),全稱是indirect Time-of-Flight,直譯就是間接光飛行時(shí)間。所謂間接,就是指iToF是通過(guò)測(cè)量相位偏移來(lái)間接測(cè)量光的飛行時(shí)間,而不是直接測(cè)量光飛行時(shí)間。
iToF向場(chǎng)景中發(fā)射調(diào)制后的紅外光信號(hào),再由傳感器接收?qǐng)鼍爸写郎y(cè)物體反射回來(lái)的光信號(hào),根據(jù)曝光(積分)時(shí)間內(nèi)的累計(jì)電荷計(jì)算發(fā)射信號(hào)和接收信號(hào)之間的相位差,從而獲取目標(biāo)物體的深度。如圖2所示。
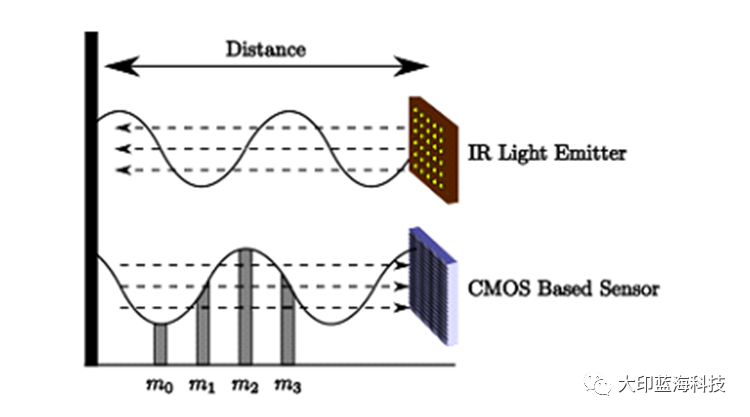
iToF成像原理示意圖
iToF模組的核心組件包含VCSEL和圖像傳感器。VCSEL發(fā)射特定頻率的調(diào)制紅外光。圖像傳感器在曝光(積分)時(shí)間內(nèi)接收反射光并進(jìn)行光電轉(zhuǎn)換。曝光(積分)結(jié)束后將數(shù)據(jù)讀出,經(jīng)過(guò)一個(gè)模擬數(shù)字轉(zhuǎn)換器再傳給計(jì)算單元,最終由計(jì)算單元計(jì)算每個(gè)像素的相位偏移。iToF計(jì)算深度的方式通常是采用4-sampling-bucket算法,利用4個(gè)相位延遲為0°,90°,180°和270°的采樣信號(hào)計(jì)算深度。如圖3所示
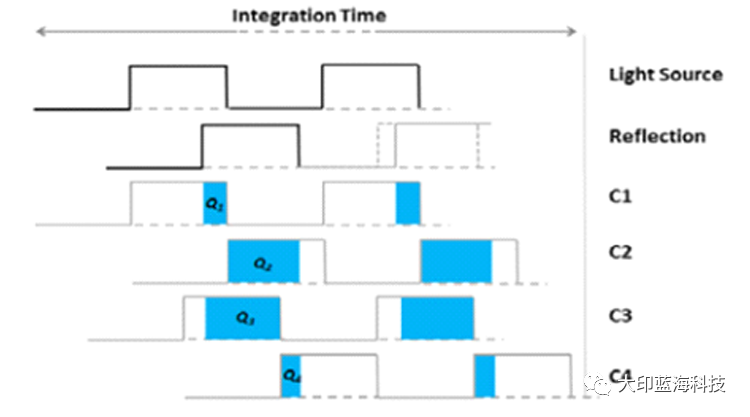
連續(xù)波調(diào)制方式測(cè)相位偏移原理示意圖
根據(jù)上述原理圖,可以得到相位偏移的計(jì)算公式, 。然后,再根據(jù)相位偏移計(jì)算深度, 。其中, 是調(diào)制信號(hào)的頻率, 是光速。
性能對(duì)比
dToF和iToF雖然都是利用光飛行時(shí)間技術(shù),但是兩者在測(cè)距原理和硬件實(shí)現(xiàn)上都有差異。軟硬件的差異會(huì)導(dǎo)致這兩類ToF在各方面的性能表現(xiàn)上各有千秋。
衡量ToF的性能指標(biāo),需要考慮幾個(gè)方面。因?yàn)門oF是一個(gè)可以測(cè)距的相機(jī),作為一個(gè)測(cè)距設(shè)備,基本的評(píng)價(jià)指標(biāo)有測(cè)距精度和有效探測(cè)距離。其次,作為相機(jī)而言,圖像分辨率也是一個(gè)重要的評(píng)價(jià)指標(biāo)。此外,由于ToF本身只能提供3D信息,它將來(lái)更多的發(fā)展是集成到3D相關(guān)的應(yīng)用,比如3D建模、AR以及移動(dòng)平臺(tái)。在集成到其他3D相關(guān)的應(yīng)用時(shí),尤其是移動(dòng)端和機(jī)器人平臺(tái),必須要考慮它的能耗和成本,以及在各種復(fù)雜場(chǎng)景下的抗干擾能力。以上的這些特性,決定了dToF和iToF有著各自適用的應(yīng)用場(chǎng)景。
接下來(lái),我們會(huì)從精度、有效探測(cè)距離、圖像分辨率、能耗、成本、抗干擾等7個(gè)方面,對(duì)比iToF和dToF的優(yōu)劣。
精度 精度指真實(shí)深度值和相機(jī)的測(cè)量值之間的差,是衡量一個(gè)測(cè)量設(shè)備的基本指標(biāo)。
對(duì)于dToF,由于它采用單光子雪崩二極管(SPAD),能夠在很短的時(shí)間間隔內(nèi)測(cè)量吸收的光子數(shù),最小能夠在 級(jí)的時(shí)間內(nèi)產(chǎn)生響應(yīng)電流。TDC的時(shí)間分辨率也高于 ,所以它的理論精度可以達(dá)到 。但是,由于雪崩過(guò)程存在量子噪聲和放大器噪聲,以及dToF中TDC模塊存在的固有噪聲,導(dǎo)致目前dToF的實(shí)際精度只能達(dá)到cm級(jí),和iToF相近。但是,理論上dToF的測(cè)量誤差不會(huì)隨著測(cè)量距離的增加而增大。
iToF的測(cè)量精度和幾個(gè)因素有關(guān),分別是調(diào)制光的頻率,光照功率以及積分時(shí)間。前文已經(jīng)提到了iToF的深度計(jì)算公式 。由此,可以推出深度噪聲(精度) 。由于c對(duì)應(yīng)光速,是一個(gè)固定值,所以深度精度和調(diào)制光的頻率、相位信噪比(phase SNR)有關(guān)。當(dāng)相位信噪比一定時(shí),頻率越高,深度噪聲越小,也意味著深度精度越高。
iToF的相位信噪比和傳感器接收到的光電流有關(guān)系。
其中,代表調(diào)制信號(hào)生成的電子, 代表調(diào)制光和環(huán)境光生成的電子總和, 代表電容的固有噪聲, 是調(diào)制對(duì)比度,描述傳感器分離和收集光電子的質(zhì)量。所以, 調(diào)制光信號(hào)生成的電子數(shù)越多,相位信噪比越大,進(jìn)而推出深度精度越高。增大 有兩種方式,一種是增大光照功率,另外一種就是延長(zhǎng)曝光時(shí)間,也就是前文提到的積分時(shí)間。
總的來(lái)說(shuō),目前的iToF深度精度在 級(jí),并且隨著測(cè)量距離的增大,反射光的強(qiáng)度減小,相位測(cè)量的信噪比減小,[敏感詞]誤差也會(huì)隨之增大。
有效探測(cè)距離 有效探測(cè)距離指相機(jī)能夠輸出可靠深度的距離范圍,可靠深度意味著該深度值和真實(shí)值的誤差小于一定閾值。舉個(gè)簡(jiǎn)單的例子,假設(shè)測(cè)量誤差在2cm以內(nèi)時(shí),我們視作該深度值是可靠的。如果一個(gè)ToF模組測(cè)量5米的物體時(shí),測(cè)量值是5.02米,誤差剛好達(dá)到了預(yù)先定義的極限。當(dāng)物體位于5.01米時(shí),測(cè)量值是5.22米,誤差超出了2cm。我們就可以說(shuō)該ToF模組的有效探測(cè)距離是5米。
當(dāng)然,限制ToF的有效探測(cè)距離的主要因素之一是相位模糊現(xiàn)象。
對(duì)于dToF而言,當(dāng)測(cè)量距離較遠(yuǎn)時(shí),光飛行一個(gè)來(lái)回的時(shí)間超過(guò)了兩次連續(xù)發(fā)射脈沖的間隔,傳感器在發(fā)射第二個(gè)測(cè)量信號(hào)后,才接收到[敏感詞]個(gè)測(cè)量信號(hào)的反射波,就會(huì)把該反射波錯(cuò)認(rèn)為是第二個(gè)測(cè)量信號(hào)的近距離反射波,這時(shí)就會(huì)出現(xiàn)相位模糊現(xiàn)象。如圖4所示。圖4中case1表示的是近距離場(chǎng)景下dToF的測(cè)距原理圖,case2表示的是遠(yuǎn)距離場(chǎng)景下,發(fā)生相位模糊現(xiàn)象的測(cè)距原理圖。
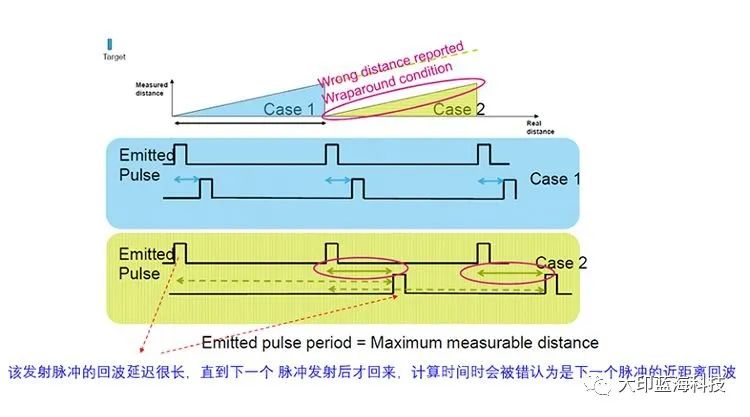
dToF脈沖測(cè)距原理示意圖
對(duì)于iToF而言,深度是通過(guò)相位偏移計(jì)算得到的,而相位偏移是通過(guò)一個(gè)反正切函數(shù)得到的 。反正切函數(shù)的返回值只會(huì)落在 ,所以測(cè)量深度的返回值也只會(huì)落在 。換言之,即使實(shí)際距離超出了 ,最終iToF的輸出深度也會(huì)落在 。這是由于三角函數(shù)的周期性帶來(lái)的相位模糊。
dToF會(huì)受到測(cè)量頻率(相鄰兩次測(cè)量的間隔時(shí)間)限制,iToF的有效探測(cè)距離會(huì)受到調(diào)制光的頻率限制。dToF在測(cè)量遠(yuǎn)距離物體時(shí),可以適當(dāng)增加兩次測(cè)量之間的間隔,減少測(cè)量次數(shù)。但是,減少測(cè)量次數(shù)會(huì)同時(shí)降低測(cè)量精度,相當(dāng)于是用精度換取有效探測(cè)距離。而iToF也可以通過(guò)降低調(diào)制光的頻率,從而犧牲一定的測(cè)量精度以獲得更遠(yuǎn)的有效探測(cè)距離。
對(duì)于iToF而言,可以利用雙頻解決相位模糊現(xiàn)象。利用兩個(gè)不同頻率的測(cè)量數(shù)據(jù)去求解相位模糊度,從而恢復(fù)正確深度值。借助雙頻測(cè)量可以同時(shí)實(shí)現(xiàn)高精度測(cè)量和高有效探測(cè)距離。
圖像分辨率 dToF的圖像分辨率受到SPAD的限制,分辨率一般小于QVGA(320*240像素),新款iPad Pro的dToF分辨率有所提升,但是具體大小還未可知。
iToF技術(shù)發(fā)展相對(duì)成熟,圖像的分辨率大多都達(dá)到了QVGA(320*240像素),上海數(shù)跡的TC-S系列相機(jī)的分辨率可以達(dá)到VGA(640*480像素)。微軟[敏感詞]的Kinect有多個(gè)圖像分辨率,[敏感詞]可以達(dá)到1024*1024像素。
能耗 從發(fā)射信號(hào)來(lái)看, dToF則采用 級(jí)的脈沖激光,iToF目前大多采用連續(xù)波調(diào)制。相比較而言,脈沖波能夠達(dá)到超低占空比,所以功耗也較低。
從光照模式來(lái)看,由于dToF的測(cè)量精度不會(huì)隨著測(cè)量距離的增大而降低,所以功耗也會(huì)相對(duì)較低。反之,iToF目前采用的大多是面光發(fā)射方式。并且,隨著測(cè)量距離的增大,iToF需要提高光照功率或者延長(zhǎng)曝光時(shí)間來(lái)獲取更高的精度,所需的功耗也會(huì)大幅增加。
成本 dToF采用的是數(shù)字電路架構(gòu),不需要模數(shù)轉(zhuǎn)換。iToF采用的是模擬電路結(jié)構(gòu),需要模數(shù)轉(zhuǎn)換芯片。
對(duì)于整體的硬件架構(gòu)而言,dToF的核心組件SPAD的制作工藝復(fù)雜,現(xiàn)有的資源少。iToF沒(méi)有這方面的顧慮。
在系統(tǒng)集成方面, dToF還需要額外的時(shí)間處理電路,系統(tǒng)集成難度較高。iToF的系統(tǒng)集成容易,不需要額外的測(cè)量電路。
抗環(huán)境干擾 環(huán)境干擾包括場(chǎng)景中環(huán)境光干擾、多路徑反射光干擾以及不同表面灰度等影響。這一類環(huán)境干擾發(fā)生在外界,和ToF本身的關(guān)系不大,環(huán)境干擾的差異主要是由不同ToF的測(cè)距原理引起的。
dToF單幀深度圖獲取時(shí),會(huì)經(jīng)歷多次重復(fù)測(cè)量,并且采用時(shí)間直方圖統(tǒng)計(jì)的方式計(jì)算飛行時(shí)間,比較容易區(qū)分信號(hào)中的干擾成分。抗環(huán)境干擾能力更強(qiáng)。
iToF在曝光階段,部分環(huán)境光混雜在調(diào)制光中被傳感器接收,然后計(jì)算相位偏移。無(wú)法從單次測(cè)量的結(jié)果中區(qū)分出環(huán)境光引起的干擾。環(huán)境光越強(qiáng),相應(yīng)的,引起的深度誤差也越大。
應(yīng)用場(chǎng)景 dToF功耗低,并且體積小巧,更加適合工業(yè)機(jī)器人等需快速進(jìn)行測(cè)距避障檢測(cè)的應(yīng)用,以及其他在空間受限的緊湊型設(shè)計(jì)中。
dToF抗環(huán)境干擾表現(xiàn)比較好,目前在戶外場(chǎng)景下的測(cè)距精度比iToF更加高,在戶外應(yīng)用場(chǎng)景中也比較占優(yōu)。
dToF的時(shí)間分辨率高,測(cè)量距離增大時(shí)精度不會(huì)大幅衰減,能耗也不會(huì)大幅提升,在AR應(yīng)用中的優(yōu)勢(shì)也比較顯著。
iToF的圖像分辨率較高,在物體識(shí)別,3D重建以及行為分析等應(yīng)用場(chǎng)景中能夠重現(xiàn)場(chǎng)景中更多的細(xì)節(jié)信息,在機(jī)器人、新零售等應(yīng)用領(lǐng)域占優(yōu)。

3D ISP
dToF和iToF兩者的目標(biāo)都是輸出一幅高質(zhì)量的深度圖像,所以兩者都需要深度數(shù)據(jù)層面的濾波和噪聲修正,比如空域?yàn)V波、點(diǎn)云域的噪聲濾波以及非一致性像素校準(zhǔn)等。此外,兩者都擁有透鏡成像系統(tǒng),所以無(wú)論是dToF還是iToF,都需要透鏡失真補(bǔ)償。硬件的溫度變化帶來(lái)的噪聲也同時(shí)存在于兩種ToF中,所以溫度補(bǔ)償也是兩者所必需的。
dToF是發(fā)射脈沖波,而不是特定頻率的調(diào)制波,所以dToF不需要做和調(diào)制光的頻率相關(guān)的處理,包括頻率校準(zhǔn)、自動(dòng)頻率選擇、高動(dòng)態(tài)范圍(HDR)。但是dToF的發(fā)射脈沖也有一定的頻率,即相鄰兩個(gè)發(fā)射脈沖之間的時(shí)間間隔,dToF的頻率校準(zhǔn)和發(fā)射脈沖的頻率相關(guān)。dToF僅僅輸出深度圖,而iToF同時(shí)輸出深度圖和幅值圖,所以dToF不需要做幅值校準(zhǔn)。
此外,由場(chǎng)景干擾引起的多徑、相位模糊、運(yùn)動(dòng)模糊、內(nèi)反射等都是兩者所共有的問(wèn)題,雖然dToF因?yàn)槌上裨淼奶匦跃哂懈玫目弓h(huán)境干擾能力,但是還是會(huì)受到這一類場(chǎng)景干擾的影響。不過(guò)不同的是,因?yàn)閐ToF和iToF的成像原理不同,兩者所需要的深度修正方式也會(huì)有所差異。
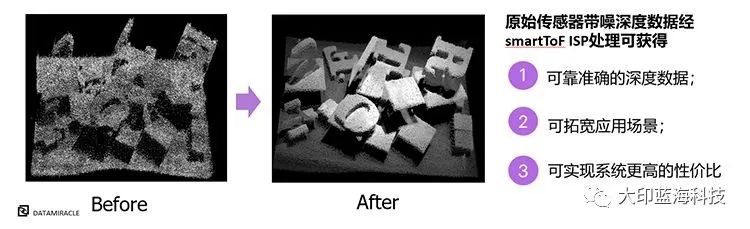
dToF和iToF兩者因?yàn)闇y(cè)距原理和硬件架構(gòu)的不同,各方面的性能互有優(yōu)劣,適用場(chǎng)景也不盡相同。兩者均面臨場(chǎng)景的適應(yīng)性,如何在任意場(chǎng)景下獲取可靠和準(zhǔn)確的深度數(shù)據(jù)是非常大的技術(shù)挑戰(zhàn),是ToF技術(shù)普及的關(guān)鍵。ToF應(yīng)用技術(shù)的普及有賴于3D ISP增強(qiáng)引擎來(lái)消除干擾,降低功耗,提高實(shí)時(shí)性能;需要面向3D行業(yè)的ISP IP及中間件,有力支撐上層應(yīng)用。所以說(shuō)3D ISP是3D成像市場(chǎng)爆發(fā)的必要條件。數(shù)跡智能團(tuán)隊(duì)正在研發(fā)3D ToF ISP Smart3D-ISP,以ISP技術(shù)為核心系統(tǒng)性地提升無(wú)論是dToF還是iToF的性能并降低功耗和成本是多年來(lái)的研發(fā)目標(biāo),將我們的3D ToF技術(shù)植入每部手機(jī)、每輛汽車、每個(gè)機(jī)器人、每臺(tái)家電,從而改變機(jī)器對(duì)世界的“看法”,實(shí)現(xiàn)深度的智能。
免責(zé)聲明:本文轉(zhuǎn)載自“大印藍(lán)海科技”,本文僅代表作者個(gè)人觀點(diǎn),不代表薩科微及行業(yè)觀點(diǎn),只為轉(zhuǎn)載與分享,支持保護(hù)知識(shí)產(chǎn)權(quán),轉(zhuǎn)載請(qǐng)注明原出處及作者,如有侵權(quán)請(qǐng)聯(lián)系我們刪除。